Предисловие
Желание приобщиться к сообществу радио-моделистов требует значительных финансовых затрат, особенно на начальном этапе. Самодельный регулятор скорости - это как раз то устройство, на котором можно немного сэкономить.
В интернете нашлось некоторое количество схем. К сожалению, регуляторы с реверсом, которые мне попадались, не подходили по разным причинам. То казались сложными, то не на том контролере, то денег за прошивку требовали, то описание даже не на английском. Поэтому захотелось сделать что-то свое.
Не изобретая велосипед, я взял за основу схему не реверсивного регулятора с RC Design. Немного ее доработал, поправил программу, и получил регулятор с обратным ходом. Никакие новые детали не использовались, так что вопрос доступности, судя по всему, не должен возникнуть. Весь комплект обошелся в магазине «Чип и Дип» примерно в 8 долларов, плюс денёк возни с паяльником.
Практическая часть
Характеристики устройства выглядят не слишком выдающимися, но регулятор и не претендует на профессиональное использование.
Частота управляющего ШИМа 3кГц
Внутреннее сопротивление 0.1 Ом
Напряжение питания 4.8В - 7.2В
Размер платы (делал на монтажной ) 50 х 25 мм
Относительно высокое внутреннее сопротивление обусловлено простотой конструкции, которая рассчитана на работу в HPI RS4 micro со стандартным мотором. На четырех банках GP2200 транзисторы горячие, но держат. Машинка катается все 40 минут без проблем.
Если вы захотите использовать регулятор с более мощными моторами, то для увеличения рабочих токов можно сделать следующее:
в первую очередь, заменить транзисторы IRF9Z34 на IRF4905 (хотя они дороже)
установить транзисторы на радиатор
поставить несколько транзисторов параллельно
Для упрощения конструкции, в прошивке удалена процедура, защищающая от случайных включений, из-за небольшого интервала холостого хода. В принципе ее можно вернуть, исключив команду «goto aap» в тексте программы. Также отсутствует режим тормоза, вместо него используется задний ход.
Сборка и настройка
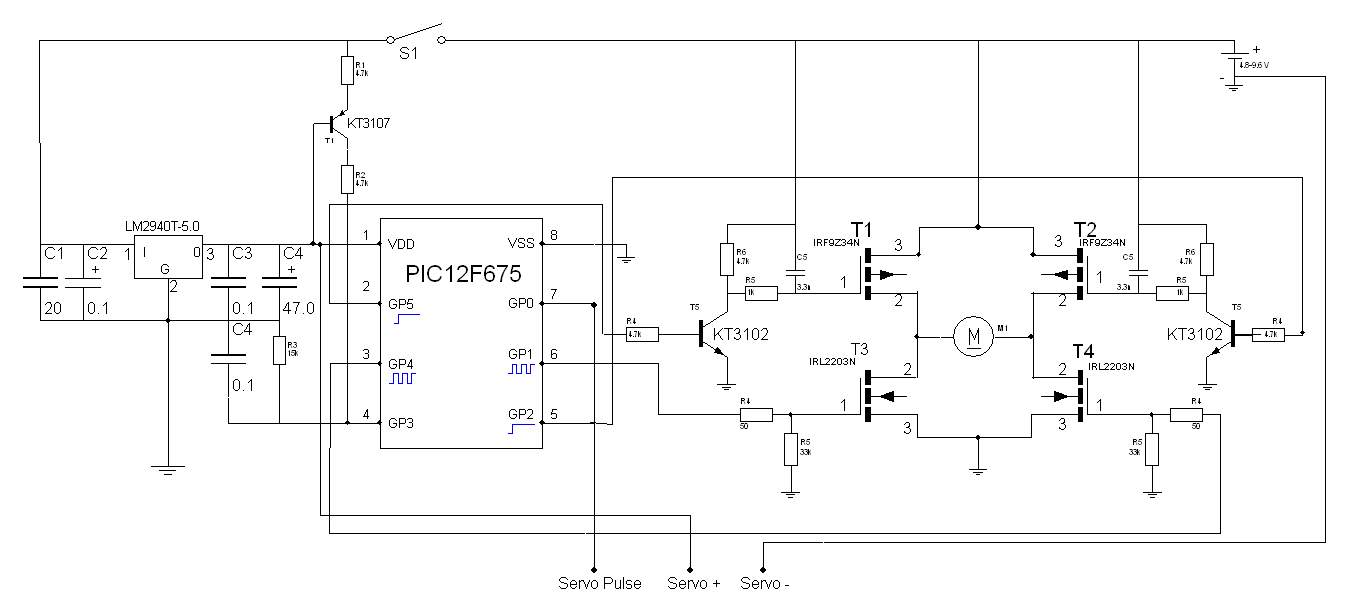
Конструкция практически не отличается от своего собрата без реверса. Добавлена пара транзисторов и цепочек управления.
Программа регулятора рассчитана под микроконтроллер PIC 12 F 675 или PIC 12 F 629. Это позволяет при необходимости менять характеристики прошивки. В принципе, можно использовать и PIC 12 C 509.
Прежде чем прошивать микроконтроллер необходимо считать поправочную константу. Если при подключении регулятора, в нейтральном положении курка двигатель вращается вперед – необходимо увеличить значение поправки, и наоборот. После этого прошить контроллер с новым параметром.
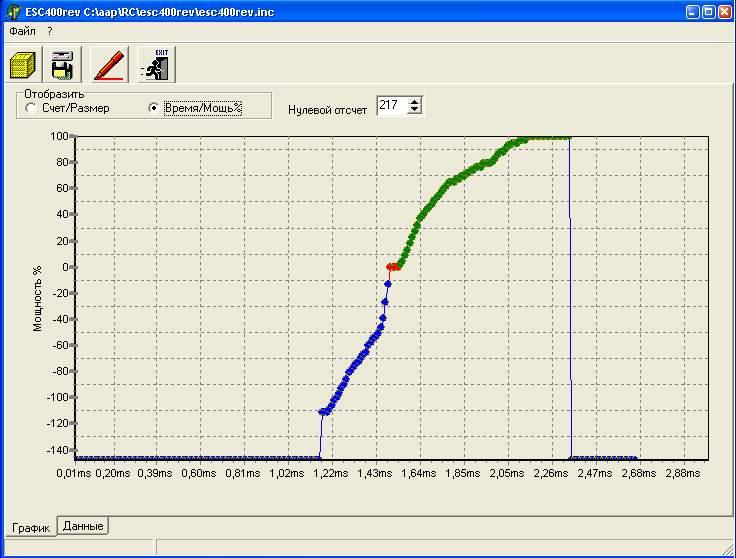
Для настройки управляющей характеристики регулятора (зависимости мощности от положения курка передатчика) сделана небольшая утилита. В данной версии она может читать файл *. inc и отображать его в виде графиков. Первый график – зависимость размерности от количества отсчетов, второй – зависимость мощности от длительности управляющего импульса. Во втором режиме возможности редактирования пока нет.